
博客
RF-DETR 与 YOLO 对比:计算机视觉中的 Transformer 架构

过去十年间,目标检测领域经历了多轮架构迭代与变革。早期检测算法以基于区域的卷积神经网络(RCNN)等双阶段检测器为主流,该类架构将候选区域生成与目标分类拆分为两个独立环节。后续单阶段检测器应运而生,以小幅精度损耗为代价,换取检测速度的大幅提升。YOLO(你只需观测一次)自此成为实时目标检测场景下的主流单阶段检测模型。
从 YOLOv5 到 YOLOv12 及后续迭代版本,系列模型始终以单阶段卷积神经网络(CNN)为基础架构,持续挖掘性能上限。每一次版本更新都实现了实打实的性能优化,在保障低延迟推理能力、满足落地实用性的同时,不断提升平均精度均值(mAP)指标。
RF-DETR 则采用完全差异化的技术路线,基于 Transformer 架构搭建,摒弃了 YOLO 核心的锚框机制与网格推理逻辑,同时保留了 YOLO 取得成功的核心优势:
-
消费级硬件与边缘设备的高效推理能力 -
主流基准数据集下的均衡检测精度 -
适配工业落地的轻量化流程架构
RF-DETR 并非在推理速度与轻量化程度上超越 YOLO,其核心优势在于检测精度更高、调参难度更低、横向扩展能力更强,是面向下一代视觉任务研发的新一代检测模型。
想要厘清 RF-DETR 的精度优势,需深入拆解两款模型的底层架构设计。二者的性能差距并非偶然,而是图像特征推理逻辑差异带来的必然结果。
YOLO 工作原理
YOLO 属于典型单阶段检测器,无需提前筛选感兴趣区域再分类,而是将输入图像划分为均匀网格,通过单次前向传播,直接预测每个网格单元的目标边界框与类别概率,这也是其高速推理的核心原理。
该设计存在固有局限性:模型的空间上下文感知能力受限,单个网格单元仅能捕捉局部感受野特征,依赖局部区域信息完成预测,无法结合全局画面内容。该缺陷在复杂场景中尤为突出:
-
处于网格边界的小目标极易漏检、定位偏移 -
密集场景下重叠目标难以精准分割 -
多数 YOLO 版本依赖预定义锚框,需针对不同数据集专项调优,目标形态差异较大时泛化能力大幅下降 -
需引入非极大值抑制(NMS)后处理过滤重复检测框,增加推理延迟与超参调优成本
历代 YOLO 版本通过优化锚框设计、升级骨干网络、迭代架构细节,持续缓解上述问题,但卷积基础架构带来的底层约束无法彻底消除。
RF-DETR 工作原理
RF-DETR 以 Transformer 为核心架构,将目标检测定义为集合预测任务。模型不再依托网格划分与局部特征提取,而是通过可学习的目标查询向量,结合全局注意力机制同步感知整张图像的特征信息。
该架构带来多项核心能力升级:
-
完全摒弃锚框机制,无需依赖预设目标形态先验,自主学习目标特征完成预测; -
实现端到端训练,剔除 NMS 等后处理环节,直接输出标准化检测结果; -
全局注意力机制让每一个目标查询向量都能获取全图上下文,彻底解决小目标、杂乱场景下的局部推理缺陷。
相较于传统卷积检测器,RF-DETR 内部逻辑更为复杂,注意力算子计算量更高,训练阶段显存占用更大。但在工程落地层面优势显著:人工启发式调参项大幅减少,模型稳定输出的门槛更低。伴随现代显卡显存容量升级,RF-DETR 的落地门槛已大幅降低。
精度差距:架构差异的直观体现
底层架构的区别,直接转化为可量化的精度差距,尤其在 YOLO 局部推理存在短板的场景中,RF-DETR 优势显著。
在 COCO 等通用基准数据集上,同等参数量条件下,RF-DETR 的 mAP 指标全面领先 YOLO。以 RF-DETR-B 与 YOLOv10-B、YOLOv12-B 对比为例,基础精度全面占优,且在小目标检测子集(AP-S)中差距进一步拉大,完美弥补网格推理的天然短板。
全局注意力赋予 RF-DETR 的核心优势场景:
- 小目标检测:依托全局上下文信息,精准定位网格模型易漏检、误判的微小目标;
- 重叠遮挡目标:独立化目标查询设计,精准区分重叠、遮挡实例,减少重复检测与漏检;
- 复杂背景环境:全图特征联动,有效区分前景目标与相似背景干扰元素。
|
|
|
|
|---|---|---|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
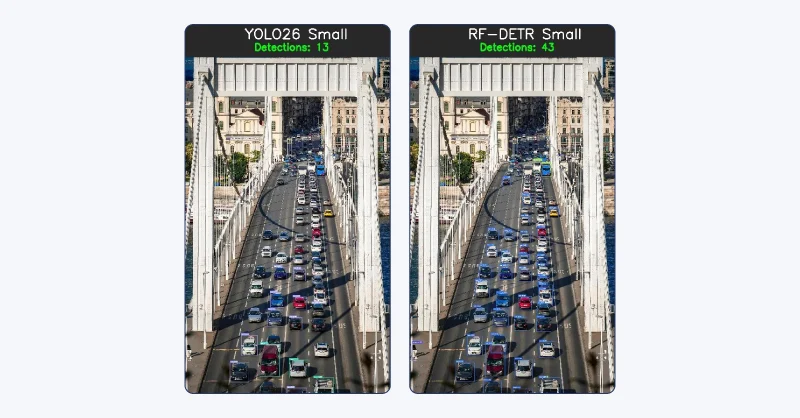
上表直观展示两款模型的取舍关系:YOLO 牺牲特征推理深度,极致优化推理速度与部署简易度;RF-DETR 聚焦检测质量与训练可复现性,率先突破 60% mAP 精度壁垒。
在交通场景的车辆检测任务中,RF-DETR 的实时检测有效数量可达 YOLOv26 的 3 倍以上。
RF-DETR 同样存在客观局限性:
- 训练显存需求更高:Transformer 注意力结构的天然属性,训练与推理显存占用高于卷积架构;
- 可通过 FP16、FP8 低精度量化技术,有效降低显存消耗,且精度损耗可控。
- 训练收敛速度较慢:从零开始训练时,需要更多迭代轮次与网络层参数完成收敛;
- 可借助开源预训练权重、视觉迁移学习快速落地。
- 冷启动延迟问题:编解码结构会造成首次推理额外耗时,对低延迟敏感场景不友好;
- 可通过模型预热、硬件定制优化解决。
- 硬件依赖更强:纯 CPU、超低显存边缘设备中,大尺寸 RF-DETR 模型部署受限,更适配 GPU 加速环境。
推理延迟对比
在限定场景下,YOLO 的速度优势真实存在:纯 CPU 推理、极致受限的边缘硬件中,YOLO 原生延迟更低,性能表现更优。但伴随低功耗、低成本通用显卡普及,二者延迟差距已大幅缩小。同等精度下,轻量化 RF-DETR 模型的推理速度已实现对标 YOLO。
行业更合理的评估指标为每算力精度收益比,该维度下 RF-DETR 优势突出,且模型规模越大,性价比优势越明显。同时现代 GPU、NPU 芯片针对注意力并行计算做深度优化,进一步抹平 Transformer 的延迟短板。
-
此外,YOLO 的速度优势仅集中于超轻量小模型;
-
中大型模型场景下,RF-DETR 的算力利用效率反超;
-
结合量化、硬件编译的定制化 RF-DETR 版本,已可满足全品类边缘设备部署需求。
轻量化认知纠正
业界普遍存在 “Transformer 体量庞大、部署成本高昂” 的固有认知,该印象源于早期 DETR 系列模型收敛慢、显存占用极高的缺陷。新一代 RF-DETR 已完成全方位架构优化:
-
可变形注意力替代密集全局注意力,以稀疏采样降低二次方级计算复杂度; -
训练策略全面升级,收敛周期相较初代 DETR 大幅缩短; -
轻量化小尺寸版本持续迭代,可适配早年仅支持卷积模型的低端硬件。
当然 RF-DETR 仍存在部署成本:训练显存更高、Transformer 架构学习门槛更高,但这类问题均可通过工程手段解决,且整体成本呈逐年下降趋势。
模型调优能力对比
两款模型的复杂度呈现差异化特征:YOLO 上手门槛低,但隐性调优项繁杂;RF-DETR 底层逻辑复杂,但落地调优极简。
YOLO 工业化部署需调试大量核心参数:锚框尺寸与比例适配数据集、NMS 过滤阈值按需调整、多版本随机增强策略定制化配置,参数联动性强,极易出现过拟合、欠拟合或延迟异常问题。
RF-DETR 无需配置锚框与 NMS 阈值,端到端训练流程结果稳定,跨团队、跨设备的实验复现性更强。虽 Transformer 编解码、注意力机制内部原理更复杂,但无需人工干预大量超参,落地工程成本更低。
长期深耕 YOLO 的团队会存在技术适配成本,但对于新场景、新业务拓展而言,RF-DETR 极简的调优模式具备核心竞争力。
RF-DETR 实际落地价值与长期发展潜力
基准测试数据与理论架构对比具备参考价值,而模型在工业场景的实际表现,才是评判优劣的核心标准。RF-DETR 的全局注意力与端到端设计,可有效解决工业级目标检测中的各类痛点,广泛适配高精度、高稳定性需求的视觉任务。
该类场景的共性为:优先保障检测稳定性与精准度,可适度容忍推理延迟提升。在工业系统中,高精度、高稳定性的模型,综合落地价值远高于仅追求极速推理的轻量化模型。
自动驾驶与高级辅助驾驶(ADAS)
自动驾驶系统需要精准识别远距离行人、车辆遮挡目标、天气 / 角度干扰下的交通标识等小目标、遮挡目标。YOLO 局部推理极易出现漏检、错检,而 RF-DETR 依托全局上下文关联分析,精准还原复杂路况下的目标特征。在行车安全等关键领域,该精度差距直接决定系统可靠性。
零售数据分析与库存管理
商超货架场景目标密集、光线复杂、商品尺寸差异大,是局部检测模型的典型难点。RF-DETR 独立实例预测能力,可有效区分重叠商品、减少重复识别与漏扫,保障连锁门店自动化盘点、仓储机器人标签识别等业务的运行精度。
机器人与空间感知任务
非结构化环境下的智能机器人,不仅需要识别目标类别,还需判断物体空间位置关系。RF-DETR 可构建完整场景特征表达,助力机器人精准完成抓取、避障、自主导航;面对光线变化、杂物干扰等复杂环境,检测结果稳定性更强,避免识别错误引发机械动作故障。
医学影像检测与诊断
医学影像需精准识别微小病灶、模糊手术器械等弱特征目标,局部特征提取容易遗漏关键细节。RF-DETR 的全局感受野可结合周边组织、解剖结构综合判断,完美适配放射影像筛查、手术视觉辅助等高精密医疗视觉任务。
RF-DETR 可扩展性与 YOLO 的发展瓶颈
除落地场景外,横向扩展能力是 RF-DETR 的核心长期优势。近年计算机视觉领域已充分验证:Transformer 架构的性能上限、扩展潜力全面超越传统卷积网络。
-
数据适配性更强:标注数据增量、自监督预训练对 Transformer 的性能增益更稳定; -
模型上限更高:扩大参数量可持续提升检测精度,而 YOLO 卷积架构优化已进入瓶颈期,迭代提升幅度持续收窄; -
算力规划更可控:Transformer 的算力 - 精度线性关系清晰,便于工程团队合理规划硬件资源与模型选型。
同时,视觉 Transformer 已是多模态大模型、视觉语言融合、通用人工智能感知系统的核心底座。选择 RF-DETR 架构,可无缝衔接下一代视觉技术生态,具备长期技术迭代价值。
RF-DETR 并非全维度碾压 YOLO,在极小模型 CPU 推理等细分场景,YOLO 仍保有优势。但其核心价值在于:在高精度、高稳定性的核心业务场景实现突破,大幅降低工业落地的调优与维护成本。
目标检测技术的迭代,始终以性能升级为核心方向。双阶段检测器因速度短板被单阶段算法替代,YOLO 凭借精度、速度、落地性的平衡,稳居行业标准十余年,具备充分的技术合理性。
RF-DETR 是适配人工智能新时代的新一代视觉检测算法。它无需在所有指标上实现全面超越,却精准抓住了当下工业落地与技术迭代的核心需求,依托 Transformer 架构优势,成为未来计算机视觉检测任务的核心发展方向。


相关贴子
-
 技术分享
技术分享适用于虚幻引擎的可靠 AI 编码:提高准确性并降低 词元成本
2026.04.14 36分钟阅读 -
 技术分享
技术分享AlphaFold 更新显著提高了对接、核酸和 PTMS 的准确性
2024.04.12 14分钟阅读 -
 技术分享
技术分享如何在非传统数据中心部署 GPU 服务器
2025.07.18 65分钟阅读